教程:使用iPhone相机和openCV来完成3D重建(第二部分)
翻译 | Disillusion、yaya牙牙、AIfresher
校对 | Disillusion 审核 | 邓普斯•杰弗 整理 | 菠萝妹
原文链接:
@omar.ps16/stereo-3d-reconstruction-with-opencv-using-an-iphone-camera-part-ii-77754b58bfe0
查看第一部分,请点击:第一部分
教程:使用iPhone相机和openCV来完成3D重建(第二部分)
欢迎来到关于立体重建三部曲的第2部。在本节中,我们将讨论如何校准您的相机。
就像之前所提到的,照相机的镜头使你拍的照片失真。这在三维重建中是很麻烦的,所以我们需要纠正这个问题。在校正之前,我们需要知道我们所使用的相机的内部参数。
有时这些参数是未知的,但幸运的是,OpenCV有一个专门针对这个的算法, 我们可以应用该算法开始我们的3D重建。
在整个设计过程中,我们会用到Python 3.7.1, OpenCV 3.4.4. 还有一些python第三方库: Numpy, Glob,tqdm和Pillow。因此,首先确保这些工具都已经安装好。
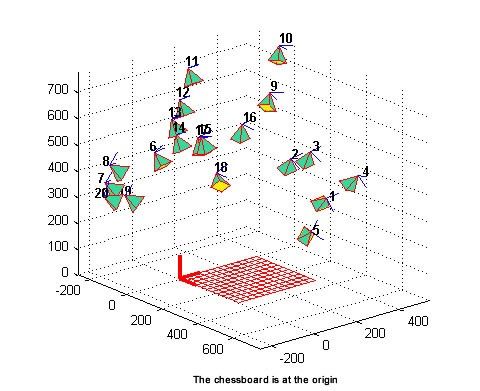
OpenCV中摄像机的标定过程是让计算机用棋盘图形扫描一幅图像,用不同的图像多次识别内部的角。

OpenCV提供的模型校准示例
大多数关于相机校准的教程都是关于网络摄像机或其他摄像机的,因此它们是为分析每一个单独的帧(或多个帧)而定制的。
在我们的情况下,我们想校准的是手机摄像头,所以我们不能这样做。为了让计算机正确地校准手机摄像头,它需要几个相同模式的例子。
在处理视频流时,我们可以分析用户在摄像机前移动时的每一帧,直到移动的模型被多次检测到(这通常是一个任意的测量,但一般是至少有10次检测)。
因为我们不处理视频流,所以我们必须为相同的模型拍多张照片。
步骤1. 得到一个棋盘图案.
前往这个链接,把这个棋盘图案打印在一张纸上。为求完美结果,确保每个正方形都是30毫米长(尽管这不是特别重要)。
步骤2. 把棋盘图案挂在白色的墙上.
当我运行这个算法时,我注意到背景中的东西越多,计算相机矩阵的时间就越长。所以我用了一面白色的墙,把棋盘图案贴在上面。确保它是完全平坦的。

根据棋盘图案重新装饰房子
步骤3. 拍几张图案的照片.
这一步很重要,确保你拍的照片有很好的光照,并且图案是从不同的角度拍摄的。还要确保图案位于屏幕的不同部分。
如果你只拍摄居中的照片,可能会发生错误的校准。确保你的照片有很多变化。
这是一个很好的关于如何拍摄图案的例子。来自乌特卡什·西纳。
在Utkarsh Sinah的博客(AI shack)中可以找到关于相机校准和如何捕捉图案的丰富资源。如果你对C++校准相机的方法感兴趣,你应该去看看。
需要指出的是,并不是所有的图片都适合检测模式。而你事先很难知道哪些照片会起作用,因此拍尽可能多的照片是一个好主意。我拍了64张。
步骤4:让我们开始代码部分
一旦你拍了足够多的照片,是时候写一些代码了(记住整个代码都在这里)。第一步是选择棋盘大小。虽然大小完全是任意的,但建议您选择一个不对称的大小(即矩形,而不是正方形)。此处,我选择了7X5。
import cv2
import numpy as np
import glob
from tqdm import tqdm
import PIL.ExifTags
import PIL.Image
#============================================
# Camera calibration
#============================================
#Define size of chessboard target.
chessboard_size = (7,5)
第二步是定义一个网格来存储所有点。存储的点需要是有序的,如:(0,0,0),(1,0,0),(2,0,0)….,(6,5,0)
#Define arrays to save detected points
obj_points = [] #3D points in real world space
img_points = [] #3D points in image plane
#Prepare grid and points to display
objp = np.zeros((np.prod(chessboard_size),3),dtype=np.float32)
objp[:,:2] = np.mgrid[0:chessboard_size[0],
0:chessboard_size[1]].T.reshape(-1,2)
因为我们要处理几个图像,所以我们可以使用glob迭代地打开它们。此外,由于OpenCv中的角点检测算法需要一些时间来处理,因此我们可以用tqdm包裹我们的循环,以了解距离处理上一个图像已经有多长时间了,还剩下多少图像没有处理。
版权保护: 本文由 沃派博客-沃派网 编辑,转载请保留链接: http://www.bdice.cn/html/28201.html


