秒杀高精地图?MIT丰田称靠简单地图和视觉可让无人车适应新环境
上周,机器人领域顶级会议ICRA 2019 公布了最佳论文奖项,共有三篇论文入围该奖项。其中一篇是来自MIT 和丰田研究院的《Variational End-to-End Navigation and Localization》,这项工作探索了如何使自动驾驶汽车具备人类推理能力,即仅凭借简单地图和视觉数据就可以适应新型复杂环境中的路线。
为了将更加类似人类的推理能力赋予自动驾驶汽车,MIT 创建了一个系统,可使自动驾驶汽车在仅使用简单地图和视觉数据的情况下,在新型复杂环境中运行。
人类司机很擅长在之前未见过的道路上驾驶汽车,他们使用的是观察能力和简单的工具。人类会将周围事物与GPS 设备提供的信息进行匹配,以确定自己所在位置和目的地位置。而这项对人类很基础的推理能力对自动驾驶汽车来说却非常困难。自动驾驶汽车在每个新区域都必须先定位和分析所有新道路,而这会花费大量时间。自动驾驶系统还依赖于3D 扫描生成的复杂地图,而这在运行时造成了极大的计算成本。
MIT 和丰田研究院合作的研究《Variational End-to-End Navigation and Localization》介绍了一种自动控制系统,该系统仅仅利用来自视频摄像头和简单GPS 地图的数据,即可「学习」人类司机在小型区域开车的驾驶模式。训练得到的系统可以控制自动驾驶汽车像人类司机一样,在全新区域内沿着规划路线行驶。
研究者扩展了能够理解地图的端到端驾驶网络。他们定义了一个新的变分网络,该网络能够根据环境的原始摄像头数据和更高级路线图进行学习,以预测可能的控制指令的完整概率分布,以及能够在地图内指定路线上导航的确定性控制指令。
此外,受人类驾驶员可以进行粗略定位的启发,研究者根据地图和观察到的视觉道路拓扑之间的对应关系,制定了如何使用其模型来定位机器人的方案。研究者在真实驾驶数据上评估了该算法,并推断了在不同类型的丰富驾驶场景下推断的转向命令的稳健性。
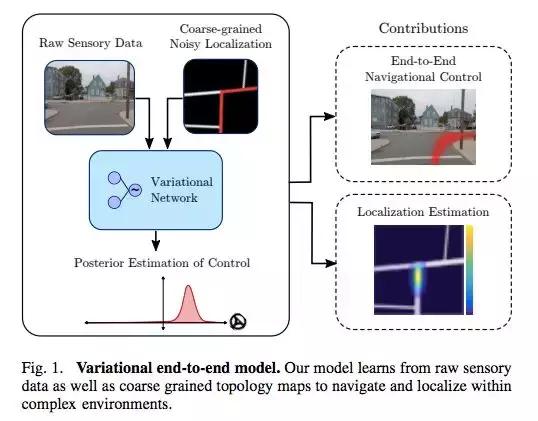
该研究提出的变分端到端模型。
与人类司机类似,该系统还可以监测地图和道路特征之间不匹配的地方。这有助于系统确定其位置、传感器或地图是否准确,从而纠正汽车的行驶路线。
最初训练系统时,人类操作员控制一辆配备多个摄像头和基础GPS 导航系统的丰田普锐斯自动驾驶汽车,并收集当地郊外街道的数据,包括多种道路结构和障碍物。在自动部署新区域的信息后,该系统可在预先规划好的路线上成功导航。
该研究的第一作者、MIT 学生Alexander Amini 表示:「使用我们的系统后,你无需预先在每条道路上进行训练,只需下载一张新地图。」该研究的共同作者、CSAIL 负责人Daniela Rus 表示,「我们的目标是创建一个对新环境具备稳健性的自动驾驶导航系统。例如,当我们训练一辆在城市环境中行驶的自动驾驶汽车时,该系统可以让这辆车在树林中也能顺畅行进,即使这个环境它从来没见过。」
点到点导航
传统的导航系统通过针对定位、绘制地图、目标检测、运动规划和转向控制等任务而定制的多个模块来处理传感器数据。Daniela Rus 组多年来一直致力于研发「端到端」的导航系统,即无需任何专用子模块即可处理输入传感器数据和输出控制指令。
但是,截止到目前,这些模型仅限于在没有实际目的地的情况下安全地沿着道路行驶。在这项研究中,研究者的端到端导航系统可以在新环境中向着目的地行进。为此,研究者训练该系统预测驾驶过程中任意瞬间所有可能控制指令的完整概率分布。
该系统使用卷积神经网络(CNN)作为模型的主干。在训练过程中,该系统从人类司机处观察和学习如何驾驶汽车。CNN 将方向盘转动和道路曲率进行关联,其中曲率信息通过摄像头和输入地图获得,并最终学习最适合不同驾驶场景(如直路、十字路口、T 形交叉口、岔口转弯、环形交叉路等)的驾驶指令。
Daniela Rus 表示:「T 形交叉口有很多可选方向,该模型一开始会思考所有可能方向,但是随着它越来越多地观察人类驾驶员的行为,它发现人们要么向左转要么向右转,没人直走。于是『直走』这个选择就被排除了,模型学习到在T 形交叉口只能左转或右转。」
导航地图又是怎样的?
版权保护: 本文由 沃派博客-沃派网 编辑,转载请保留链接: http://www.bdice.cn/html/61633.html


